Robots¶
Omnibot¶
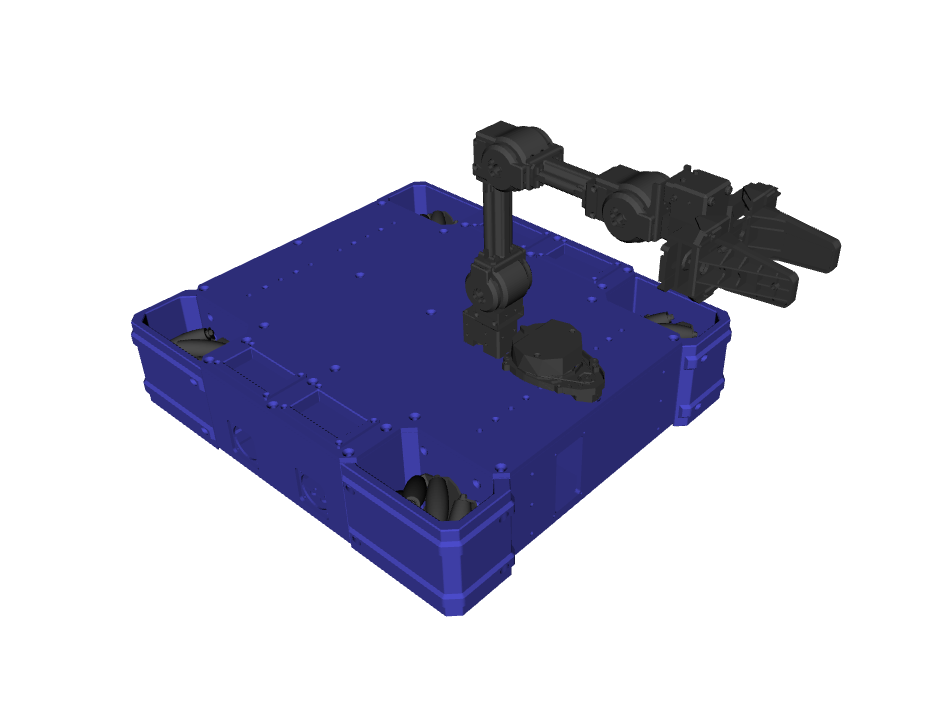
export DYNO_BASE=omnibot
export DYNO_USE_ROS_CONTROL_FOR_BASE="false"
roslaunch dyno_gazebo bringup.launch
Turtlebot3¶
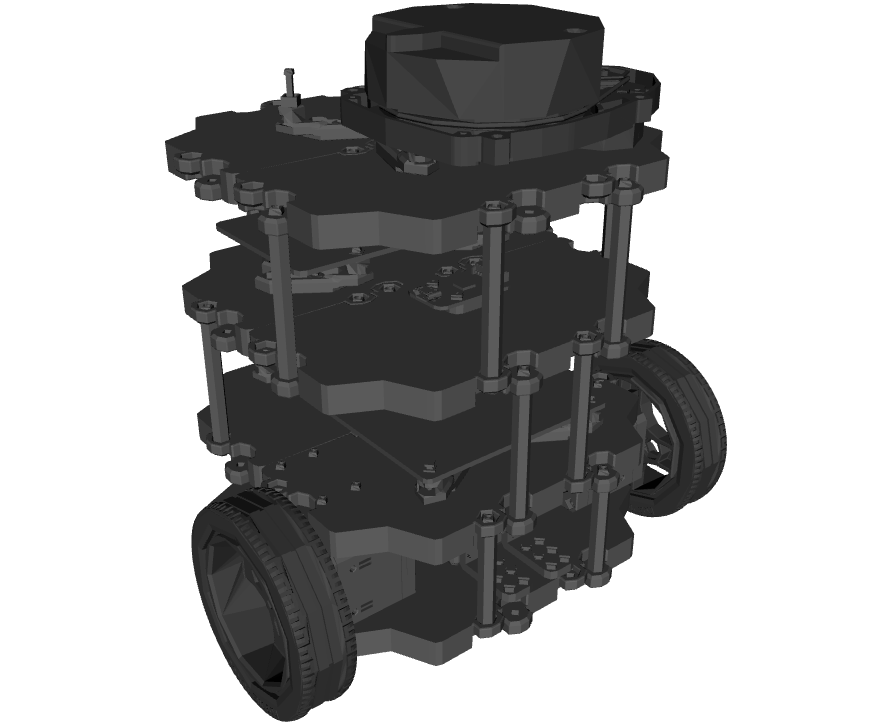
export DYNO_BASE=turtlebot3
export DYNO_USE_ROS_CONTROL_FOR_BASE="true"
roslaunch dyno_gazebo bringup.launch
Forklift¶
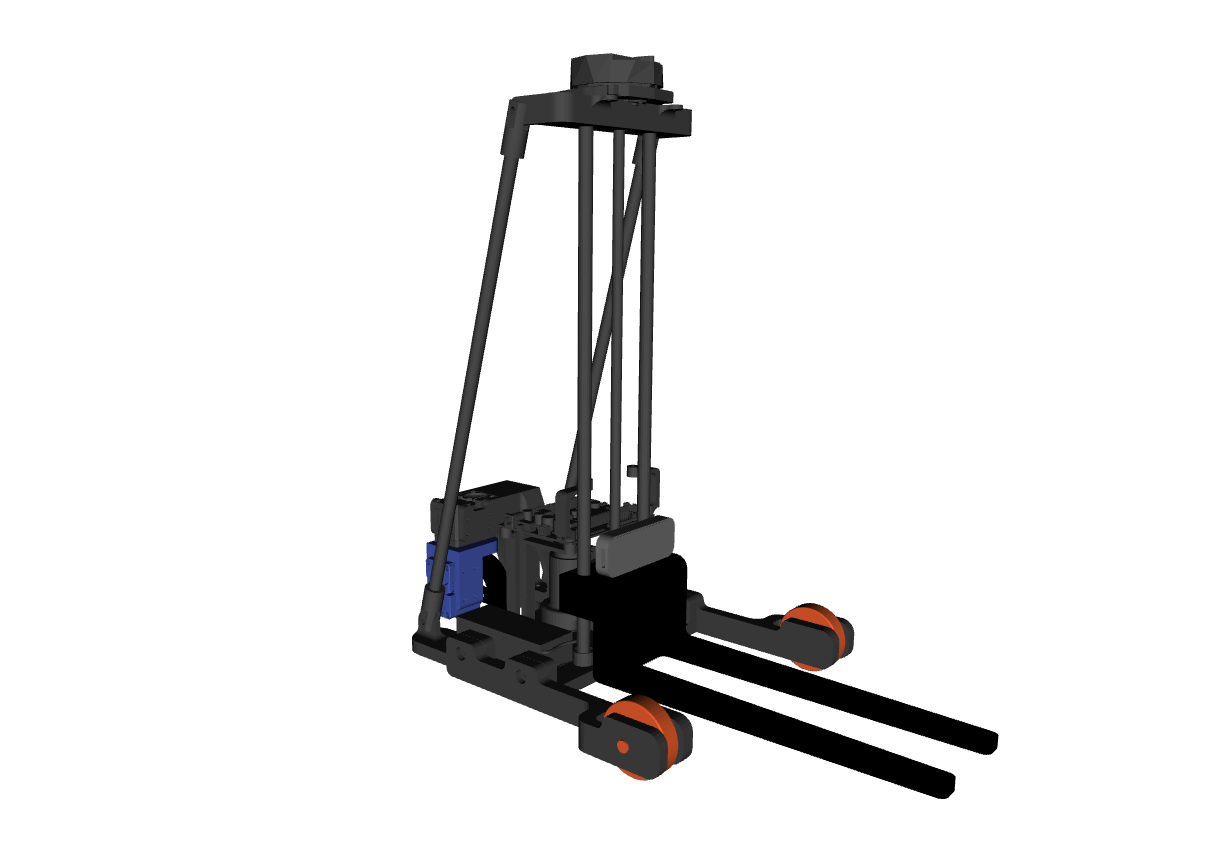
export DYNO_BASE=forklift
export DYNO_USE_ROS_CONTROL_FOR_BASE="true"
roslaunch dyno_gazebo bringup.launch
Magni¶
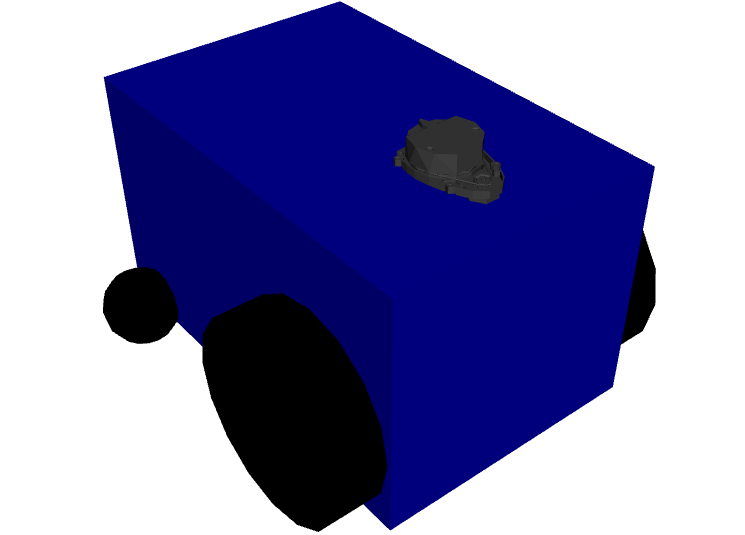
export DYNO_BASE=magni
export DYNO_USE_ROS_CONTROL_FOR_BASE="true"
roslaunch dyno_gazebo bringup.launch
Holonomic¶
export DYNO_BASE=holonomic
export DYNO_USE_ROS_CONTROL_FOR_BASE="false"
roslaunch dyno_gazebo bringup.launch
Diff Drive¶
export DYNO_BASE=diff_drive
export DYNO_USE_ROS_CONTROL_FOR_BASE="true"
roslaunch dyno_gazebo bringup.launch
Quadrotor¶
export DYNO_BASE=quadrotor
export DYNO_USE_ROS_CONTROL_FOR_BASE="false"
roslaunch dyno_gazebo bringup.launch
The quadrotor platform is not fully implemented. Mostly because of a conflict in Protocol Buffers (protobuf) between Cartographer 1.0 and hector_quadrotor.